

Description
System Architecture & Operational Principle
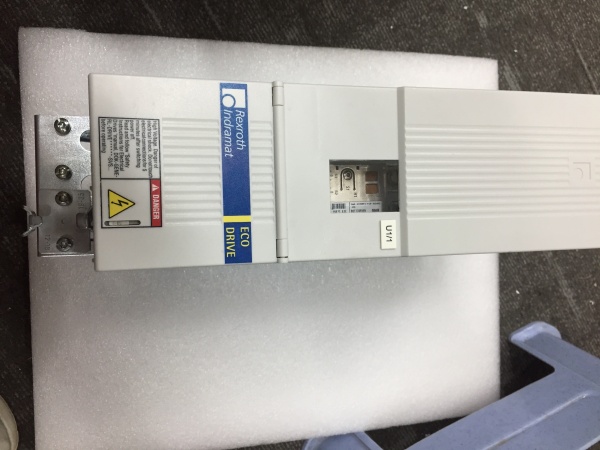
The REXROTH DKCXX.3-100-7 sits at Purdue Model Level 1 (Basic Control), bridging upstream motion controllers (e.g., Siemens SIMOTION, REXROTH MTX CNC) and downstream servo motors (e.g., REXROTH MSK series). It connects to the controller via SERCOS III or Profibus, receiving position/speed/torque commands in real-time. Downstream, it converts these to PWM signals to drive IGBT modules, which modulate the 700V DC bus for motor control. Encoder feedback (1 µm resolution) enables closed-loop correction. The ECODRIVE11 backplane allows hot-swap replacement, while the SERCOS III ring network reduces cabling complexity—critical in dense machine tool panels. Its 100A capacity handles heavy loads like 6-axis robot arms or CNC spindle drives without derating.
Core Technical Specifications
-
Physical Interface: Screw terminals (L1/L2/L3 motor power, 24V DC control), SERCOS III/Profibus ports
-
Signal Type: PWM (motor control), analog (0-10V/4-20mA auxiliary), digital I/O (16 inputs/8 outputs)
-
Rated Current: 100A (continuous), 200A (peak, 3s overload)
-
Bus Voltage: 700V DC (nominal, ±10% tolerance)
-
Communication Bus: SERCOS III (16 Mbps real-time), Profibus DP (optional)
-
Control Modes: Position (block/cyclic), speed, torque (closed-loop with encoder)
-
Operating Temperature: 0°C to 45°C (32°F to 113°F)
-
Power Draw: 150W (idle), 800W (max load with motor)
-
Weight: 12 kg (26.5 lbs)
-
Certifications: CE, UL, RoHS

REXROTH DKCXX.3-100-7
Customer Value & Operational Benefits
Reduced MTTR with Hot-Swap Backplane
The drive plugs into a modular chassis—swap it in 25 minutes without powering down the CNC. I replaced a failed unit during a lunch break, avoiding a 4-hour shutdown on a lathe line.
Prevent Unplanned Outages via STO
The FWA-ECODR3-SMT-02VRS-MS firmware includes Safe Torque Off (STO). On a press brake, it cut motor power in 10ms during an emergency stop, preventing frame damage that would’ve cost $15k to repair.
Accurate Sizing for Heavy Loads
The 100A rating handles 22kW servo motors (e.g., MSK090C-2200-NN-M1-UG1-NNNN) without overheating. A steel mill uses these to drive rolling mill screws—no derating needed even at 45°C ambient.
Field Engineer’s Notes (From the Trenches)
When mounting the DKCXX.3-100-7, leave 4 inches of clearance behind the heatsink. I once stuffed it in a crowded cabinet, and the IGBTs overheated (fault F861) within an hour. Use a thermal camera to check temps—keep the heatsink below 75°C. Wire the 700V DC bus with 6 AWG copper (not 8 AWG)—I saw a 10AWG lead melt when a motor jammed. Ground the shield of the SERCOS cable at the drive end only; double-grounding creates noise that triggers F228 position faults.
Real-World Applications
-
Heavy-Duty CNC Lathe Spindle DriveDrives a 22kW spindle motor at 3000 RPM, maintaining ±0.002 mm concentricity. Receives G-code from a REXROTH MTX CNC, uses position block mode for threading cycles. The 700V bus handles rapid acceleration without voltage sag.
-
Automotive Press Feed AxisControls a 15kW servo motor moving a 500kg die cushion at 0.5 m/s. Uses torque control mode to compensate for material thickness variations. STO engages if the operator’s palm approaches the press area.
REXROTH DKCXX.3-100-7
High-Frequency Troubleshooting FAQ
Q: What causes fault F860 (power stage overcurrent) on the DKCXX.3-100-7?
A: Typically IGBT failure or motor short. Check motor winding resistance (should be <1Ω), inspect cables for insulation damage, and test the IGBT module with a megohmmeter (leakage >10MΩ = bad). Replace the module (part # 109-1234-4A19-04) if all else checks out.
Q: Can the DKCXX.3-100-7 replace a legacy DKC01.3-080-7 drive?
A: Yes, but verify the bus voltage (legacy was 300V DC). The DKCXX.3-100-7 needs 700V DC—upgrade the power supply or add a buck converter. Also, update firmware to FWA-ECODR3-SMT-02VRS-MS; older firmware won’t recognize the 100A rating.
Q: How do I calibrate the encoder feedback on a DKCXX.3-100-7?
A: Enter service mode (front panel “MODE” button), navigate to “PARAM” > “ENCODER” > “CALIBRATE.” Rotate the motor shaft manually until the display shows “OK.” Use a laser tachometer to verify speed—error should be <0.1%.
Q: What’s the correct torque for the 700V DC terminal screws?
A: 2.5 N·m (22 in-lbs). Over-tightening strips the aluminum terminal block; under-tightening causes arcing. Use a calibrated torque wrench—cheap ones can be off by 30%.
Commercial Availability & Pricing
Please note: The listed price is not the actual final price. It is for reference only and is subject to appropriate negotiation based on current market conditions, quantity, and availability.